Transformer based Collision Detection Approach by Torque Estimation using Joint Information
Abstract
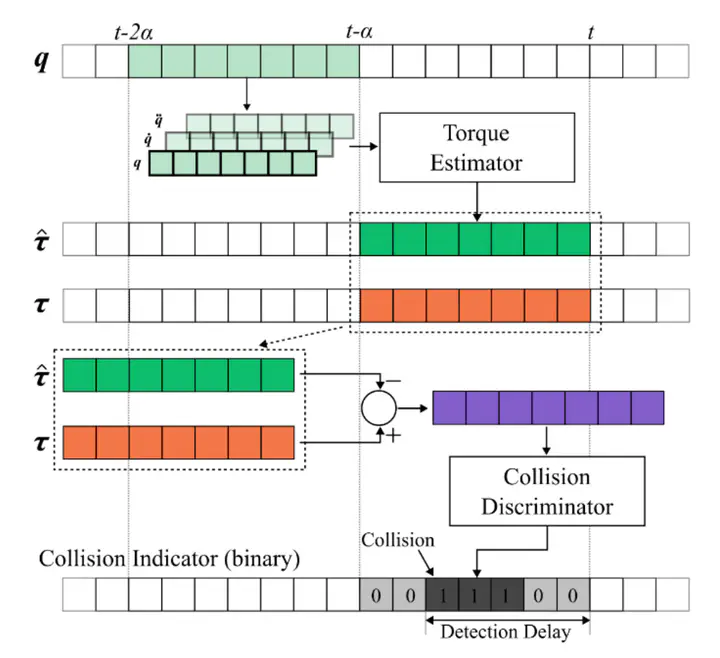
With the rising interaction between robots and humans, detecting collisions has become increasingly vital for ensuring safety. In this paper, we propose a novel approach for detecting collisions without using force torque sensors or tactile sensors, utilizing a Transformer-based neural network architecture. The proposed collision detection approach comprises a torque estimator network that predicts the joint torque in a free-motion state using Synchronous time-step encoding, and a collision discriminator network that predicts collisions by leveraging the difference between estimated and actual torques. The collision discriminator finally creates a binary tensor that predicts collisions frame by frame. In simulations, the proposed network exhibited enhanced collision detection performance relative to the other kinds of networks both in terms of prediction speed and accuracy. This underscores the benefits of using Transformer networks for collision detection tasks, where rapid decision-making is essential.
Jiwon Park
My research interests include perception for robust off-road mobile robot