Jiwon Park
Jiwon Park
Home
Projects
Publications
Experience
Talks
Contact
CV
Light
Dark
Automatic
Heightmap
DreamFlow: Local Navigation Beyond Observation via Conditional Flow Matching in the Latent Space
DreamFlow is a deep RL framework that uses conditional flow matching to extend a robot’s perceptual range beyond its sensor FOV, enabling proactive navigation around unseen obstacles in cluttered environments.
Jiwon Park
,
Dongkyu Lee
,
I Made Aswin Nahrendra
,
Jaeyoung Lim
,
Hyun Myung
PDF
DOI
arXiv
Project Page
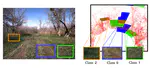
BumpyPatch: Heightmap-based Outdoor Point Cloud Segmentation to Find Less Bumpy Road
This research introduces an approach to enhancing autonomous mobile robot navigation in diverse outdoor environments. We developed a method that transforms 3D LiDAR point cloud data into grayscale heightmaps, enabling more accurate assessment of ground textures. Our system classifies terrains in both static and dynamic environments, incorporating IMU data to account for robot motion influenced by terrain. The method demonstrates superior performance in texture analysis compared to direct point cloud analysis techniques, significantly improving the ability of mobile robots to navigate safely and efficiently across various outdoor terrains. This advancement is crucial for protecting sensitive equipment and cargo while expanding the operational capabilities of autonomous robots in complex, real-world settings.
Jiwon Park
,
Hyoseok Hwang
PDF
Cite
Code
DOI
Cite
×