Jiwon Park
Jiwon Park
Home
Projects
Publications
Experience
Talks
Contact
CV
Light
Dark
Automatic
Outdoor Mobile Robot
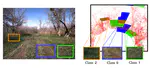
BumpyPatch: Heightmap-based Outdoor Point Cloud Segmentation to Find Less Bumpy Road
This research introduces an approach to enhancing autonomous mobile robot navigation in diverse outdoor environments. We developed a method that transforms 3D LiDAR point cloud data into grayscale heightmaps, enabling more accurate assessment of ground textures. Our system classifies terrains in both static and dynamic environments, incorporating IMU data to account for robot motion influenced by terrain. The method demonstrates superior performance in texture analysis compared to direct point cloud analysis techniques, significantly improving the ability of mobile robots to navigate safely and efficiently across various outdoor terrains. This advancement is crucial for protecting sensitive equipment and cargo while expanding the operational capabilities of autonomous robots in complex, real-world settings.
Jiwon Park
,
Hyoseok Hwang
PDF
Cite
Code
DOI
Outdoor visual SLAM and Path Planning for Mobile-Robot
The paper introduces A2XP, a novel approach for domain generalization, which optimizes prompts for each source domain and combines them for robust performance across domains, while also preserving privacy and integrity of the network architecture. Experimental results demonstrate its state-of-the-art performance in computer vision tasks and its potential for broader applications.
Seongil Heo
,
Jueun Mun
,
Jiwoong Choi
,
Jiwon Park
,
Eric T Matson
PDF
Cite
Cite
×